Kevin Huang

Hi! I am a fourth-year PhD student at the University of Washington, advised by Byron Boots and Abhishek Gupta, researching robotics, machine learning, and optimal control. Broadly, I am interested in developing end-to-end intelligent, embodied systems that continuously learn from their environment, as well as robust control and planning in uncertain and dynamic environments.
Previously, I completed my undergrad at Caltech and am fortunate to have worked with Yisong Yue and Anima Anandkumar at Caltech, and Pablo Moscato at the University of Newcastle.
selected publications
-
 Overcoming the Sim-to-Real Gap: Leveraging Simulation to Learn to Explore for Real-World RLIn Advances in Neural Information Processing Systems, 2024
Overcoming the Sim-to-Real Gap: Leveraging Simulation to Learn to Explore for Real-World RLIn Advances in Neural Information Processing Systems, 2024 -
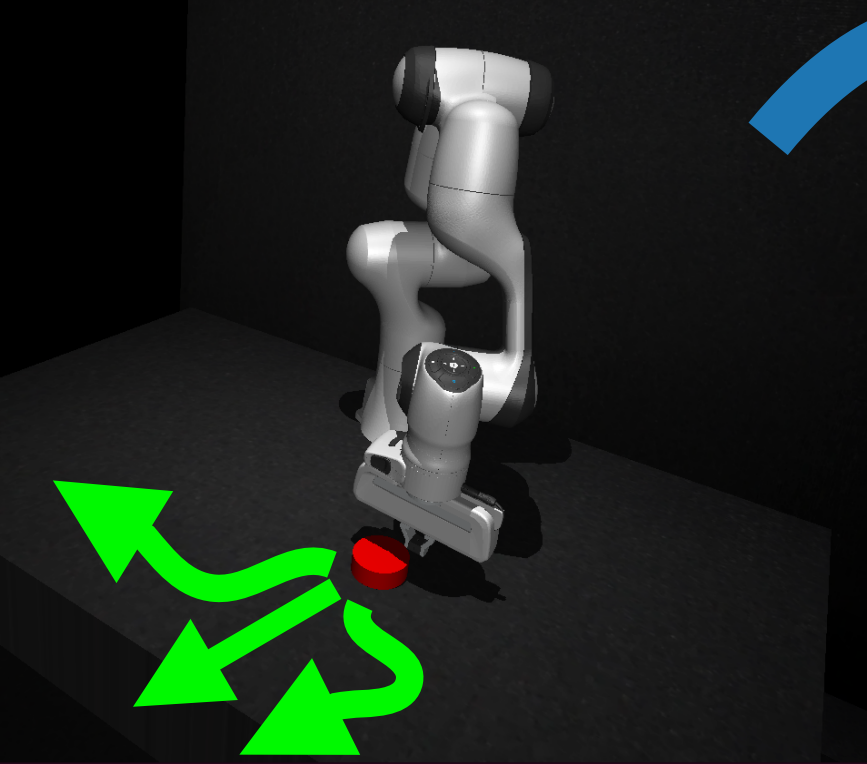
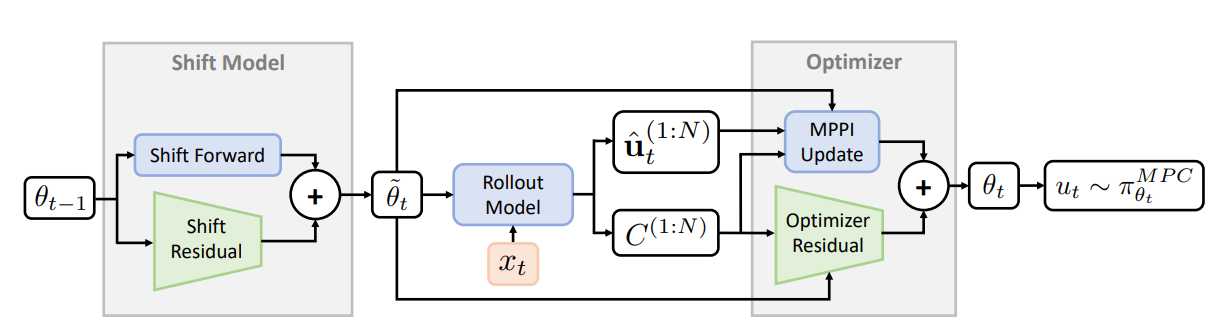 Deep Model Predictive OptimizationIn IEEE International Conference on Robotics and Automation (ICRA), 2023
Deep Model Predictive OptimizationIn IEEE International Conference on Robotics and Automation (ICRA), 2023 -
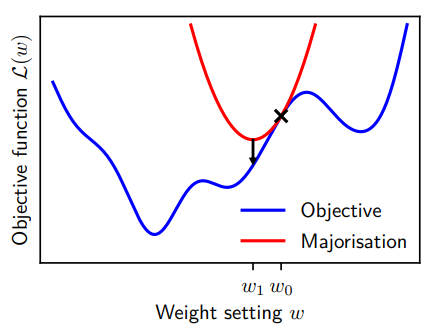 Automatic Gradient Descent: Deep Learning without HyperparametersarXiv preprint arXiv:2304.05187, 2023
Automatic Gradient Descent: Deep Learning without HyperparametersarXiv preprint arXiv:2304.05187, 2023





