Kevin Huang

Hi! I am a fourth-year PhD student at the University of Washington, working with Byron Boots and Abhishek Gupta, researching robotics and AI. Broadly, I am interested in developing end-to-end intelligent, embodied systems that continuously learn from their environment, as well as robust control and planning in uncertain and dynamic environments. My current research interests include policy improvement, world models, and leveraging large scale data in simulation and closing the sim2real gap.
Previously, I completed my undergrad at Caltech and am fortunate to have worked with Yisong Yue and Anima Anandkumar at Caltech, and Pablo Moscato at the University of Newcastle.
selected publications
-
 Overcoming the Sim-to-Real Gap: Leveraging Simulation to Learn to Explore for Real-World RLIn Advances in Neural Information Processing Systems, 2024
Overcoming the Sim-to-Real Gap: Leveraging Simulation to Learn to Explore for Real-World RLIn Advances in Neural Information Processing Systems, 2024 -
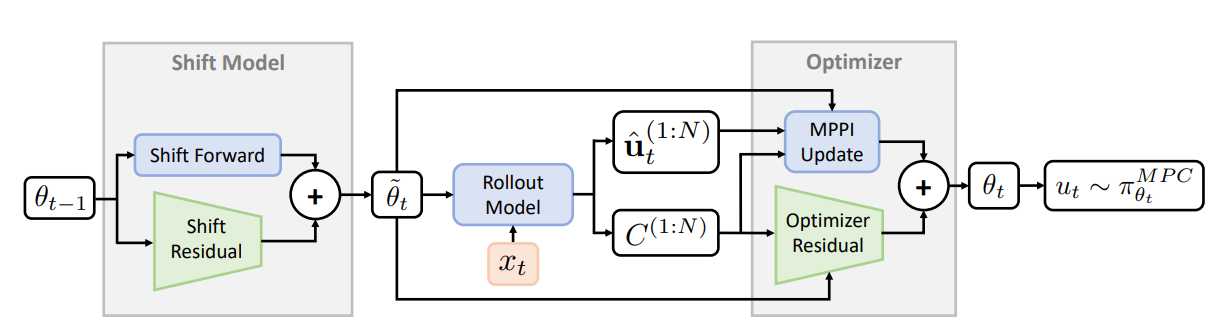 Deep Model Predictive OptimizationIn IEEE International Conference on Robotics and Automation (ICRA), 2023
Deep Model Predictive OptimizationIn IEEE International Conference on Robotics and Automation (ICRA), 2023 -
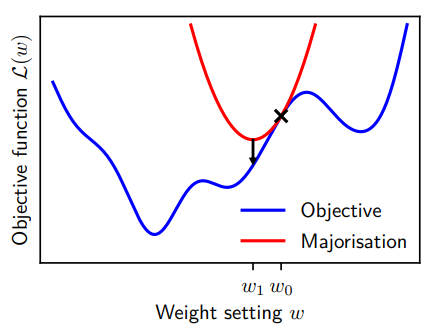 Automatic Gradient Descent: Deep Learning without HyperparametersarXiv preprint arXiv:2304.05187, 2023
Automatic Gradient Descent: Deep Learning without HyperparametersarXiv preprint arXiv:2304.05187, 2023








